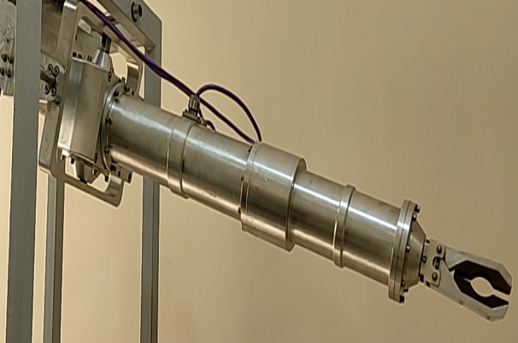
بازوی چهار درجه آزادی
(حرکت افقی، عمودی، چرخشی و گریپر)
آببند برای عمق ۳۰۰ متر (۳۶ بار فشار)
امکان جابجایی اشیاء با وزن ۵ کیلوگرم در حالت شناوری
دارای انکودر، لیمیتر، سنسور رطوبت
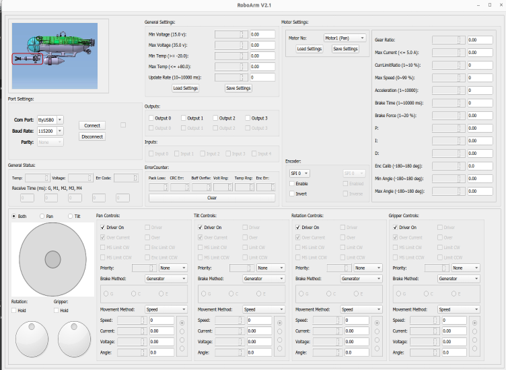
کنترل آسان و همزمان محورهای حرکتی
امکان حرکت دادن هر محور بازو با روش سرعت، ولتاژ، جریان یا زاویه مورد نظر
امکان کنترل ۵ ورودی و ۴ خروجی ۲۴ ولت
طراحی و ساخت بازوی رباتیک شناور زیرسطحی چهار درجه آزادی
ویژگیها:
مقاوم در برابر فشار ۳۶ بار
قابل استفاده تا عمق ۳۰۰ متر
قابلیت حمل اجسام تا وزن ۵ کیلوگرم در زیر آب
طراحی و پیادهسازی نرمافزار و ماژول کنترل بازوی رباتیک
ویژگیها:
کنترل و راه اندازی موتور برای چهار موتور به صورت موازی
دارای انکودر و قابلیت حرکت یا نگه داشتن بازو در زاویه دلخواه
با محدودکنندههای الکترونیکی، نرمافزاری و مکانیکی
دارای پنج ورودی و چهار خروجی
مقاوم در برابر نوسانات برق DC از 15 تا 35 ولت
دارای رابط کاربری آسان
قابلیت کنترل موتورها با تغییر پارامترهای سرعت، ولتاژ یا زاویه


{kind=link}